posted Aug 13, 2010 3:04 PM by Kwame Martin
[
updated Oct 17, 2010 4:33 PM
]
This
week I'm wrapping up, getting packed & ready to leave Providence,
RI. I had an invaluable learning experience here at Brown University. I
am very grateful for the DREU giving me this opportunity to intern here
with the Brown Robotics Lab team. It was very inspiring to hear the
logic and thought process of PhD's and graduate students as they helped
me with my difficulties and project's shortcomings. My mentor Dr.
Jenkins is an awesome individual that I will definitely be keeping in
contact with and probably be asking for a letter of recommendation in
the near future. I really wanna thank CRA & DREU for having such a
wonderful program for undergraduates. I couldn't have spent my summer
better. I got to see a new state & be educated at the same time.
|
posted Aug 7, 2010 2:23 PM by Kwame Martin
[
updated Oct 17, 2010 4:34 PM
]
In
these two weeks I successfully got the irobot to recognize the tag
& move forward toward it and stop & to also turn and face it if
it is not directly in its view, basically getting the irbot to follow
the tag. I also got the irobot to tackle the tag when close enough. This
was done using the nolan.py program in the Brown ROS package and making
some slight changes to it. Problems experienced with accomplishing this were: 1.
The webcam on the mini notebook that I used had a bad resolution
correction system, so I had to hard code a desired resolution that would
work better with the ar_recog. export GSCAM_CONFIG="v4l2src
device=/dev/video0 ! video/x-raw-rgb,width=320,height=240 !
ffmpegcolorspace ! identity name=ros ! fakesink" 2. The main goal
initially was to have the tag attached to the football and have the
irobot use the tag to seek out & tackle the/kick the ball but I
found difficulty in devising a means of doing this without the tag
toppling over and the webcam losing sight of the tag. So instead simply
attached the tag to a box to display the irobot working with the tag as
though the box was a ball. the box substitute being a little better in
this case seeing it would never topple over. Below are videos I
recorded showing the irobot performing a find & tackle and video
showing that the irobot is programmed to follow the tag if it were to be
moving. |
posted Jul 28, 2010 3:09 PM by Kwame Martin
[
updated Oct 17, 2010 4:34 PM
]
This
week was spent trying to figure out different ways to have the iRobot
successfully seek out and find a ball & play soccer with it.
Referring to the post docs & graduate students for advice, it seems
that this is easiest done by setting up a camera system on the robot
that will then in turn located tags using the ROS ar_recog package, to
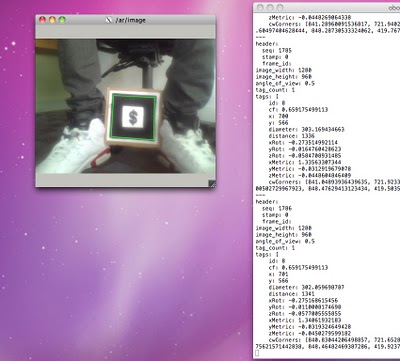
locate an image/tags over the ball. these tags are fond via
corner-finding. The ar_recog package looks for an object with 4 corners
much like a square with significant contrast between the two colors
balck & white. Once this is found, the ar_recog package outlines it
in green reporting metric values of distance & position, which can
be then used to add the iRobot in using position tracking to locate the
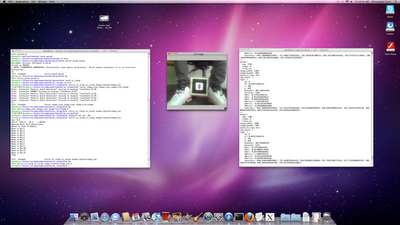
iRobot & evidently move towards it. Below are examples of AR tags: Now
using this method of AR Tag Recognition, I can now write a program that
will have the iRobot locate and follow the tag which will be mounted on
the ball & hopefully have the iRobot play soccer with the ball. Today
I also got the AR Tag Recognition up & running. Below you can see
it finding the AR Tag held in front of it & outlining it in a
green box. |
posted Jul 21, 2010 4:07 PM by Kwame Martin
[
updated Jul 28, 2010 3:14 PM
]
This
week I spent time continuing the odometer calibration of the iRobot
Create and also getting myself familiarized with writing programs using
the ROS system to control the robot's motor skills. I had to calculate
the Average Drift per Theta for the robot's forward motion & also
the rotaional motion. Below are pictures of me doing the measurements of the Average Drift per Theta: This
calculations were based on me having the iRobot run experimental
forward motions 10+ times for several different distances. For the rotational measurements a constant theta turn of 360 degrees was used & this was tested 10+ times as well. |
posted Jul 8, 2010 10:18 AM by Kwame Martin
[
updated Oct 17, 2010 4:35 PM
]
This
week's assignment involved me having to use the ROS software to design
different exercises for the Create iRobot carry out to test it's
odometer. For example, attempting to answer questions such as: "Does the
iRobot really go as far as its position tracker sensor says it does?
and if not, How far does it really go and at what angle if any?". With
this information we can design a fail safe calibrated to compensate for
this odometer error to make for more accurate & precise movement of
the iRobot in the x & y plane as it navigates to different
coordinates.
|
posted Jul 6, 2010 1:23 PM by Kwame Martin
[
updated Oct 17, 2010 4:51 PM
]
This week I successfully got the iRobot
carry out, what is called an Enclosure Escape maneuver where I program
the iRobot to be able to find its way out of a maze of enclosure using
the bumper sensors located on the front of the iRobot. When the iRobot
encounters a wall or obstacle it intelligently moves away and tries
another direction until finally escaping its enclosure.
This was done by implementing both its linear and angular velocity. See video below for details.
Also this week I was assigned my official workspace in the Robotics lab. I feel like a real researcher now. :)
|
posted Jul 6, 2010 12:00 PM by Kwame Martin
[
updated Oct 17, 2010 4:36 PM
]
This
week I successfully ran my first ROS program which made the Create
iRobot spin in one spot. I was able to quickly make myself familiar with
the ROS code and also have the iRobot perform a basic Traversal in a
straight line at a specified linear velocity. See videos below for more
details.
Controlling The iRobot Remotely From iMac
Also
this week I took time out to go check out the mall, restaurants &
nearby parks with my friend Torri. The surrounding neighborhood is
really nice, and safe. After research I take evening walks and strolls
to get my mind off stuff.
My friend Torri & I. She lives out here in East Providence, Rhode Island.
We had lunch @ a nearby Asian restaurant called, Shang Hai. Torri's sister works here. My 1st time eating clams. :)
Then we headed down to Indian Point Park by the waterside to hang out for a few.
|
posted Oct 14, 2009 11:22 AM by Kwame Martin
[
updated Oct 17, 2010 4:36 PM
]
My
first week here at Brown I was introduced to the other members of the
lab and assigned a work desk and computer, along with the robots and
tools I’ll be working with this summer.
My
mentor, Dr. Jenkins and I went out to dinner with his family @
Antonio's Pizza, to further discuss my role here at Brown this summer,
and the projects he had in mind for me to work on and his desired goals
for my research this summer. He gave me a brief summary of his
educational history and gave me pointers for my own academic journey. He
also familiarized me with my surrounding area and gave me a bit of
history on the city of Providence and the state of Rhode Island.
|
|




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}