This
week was spent trying to figure out different ways to have the iRobot
successfully seek out and find a ball & play soccer with it.
Referring to the post docs & graduate students for advice, it seems
that this is easiest done by setting up a camera system on the robot
that will then in turn located tags using the ROS ar_recog package, to
locate an image/tags over the ball. these tags are fond via
corner-finding. The ar_recog package looks for an object with 4 corners
much like a square with significant contrast between the two colors
balck & white. Once this is found, the ar_recog package outlines it
in green reporting metric values of distance & position, which can
be then used to add the iRobot in using position tracking to locate the
iRobot & evidently move towards it. Below are examples of AR tags:   Now using this method of AR Tag Recognition, I can now write a program that will have the iRobot locate and follow the tag which will be mounted on the ball & hopefully have the iRobot play soccer with the ball. Today I also got the AR Tag Recognition up & running. Below you can see it finding the AR Tag held in front of it & outlining it in a green box.  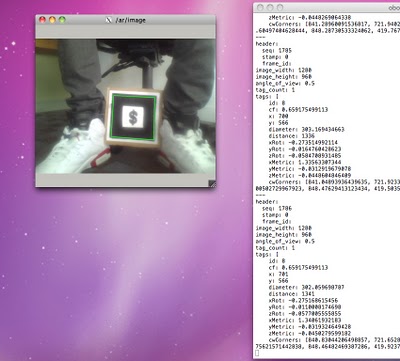 |
_text_