This section highlights the research progress for each week. Click on the 'Week' links for detailed reports for each week.

WEEK 1:
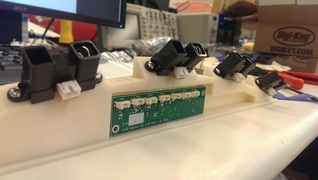
The first week was used for proof of concept for the proximity sensor to be used in the obstacle sensing system.
Sensor data was collected to finalize the type of sensor, range of operation, angle of operation and behaviour in different environments.
The first week was used for proof of concept for the proximity sensor to be used in the obstacle sensing system.
Sensor data was collected to finalize the type of sensor, range of operation, angle of operation and behaviour in different environments.

WEEK 2:
We evaluated the sensor data and designed a 3D printed part for the sensor mount and started testing the sensors with a Atmel micro-controller. A LCD display was used to display and analyse the values.
We evaluated the sensor data and designed a 3D printed part for the sensor mount and started testing the sensors with a Atmel micro-controller. A LCD display was used to display and analyse the values.

WEEK 3 & WEEK FOUR :
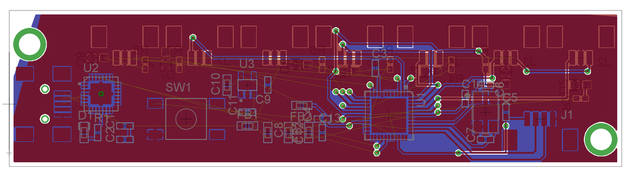
Tested the second prototype and revised the design again. We started conceptualizing the PCB for the STOP Obstacle sensor and revised the design for the mount.
Tested the second prototype and revised the design again. We started conceptualizing the PCB for the STOP Obstacle sensor and revised the design for the mount.
WEEK SIX & WEEK SEVEN:
This week I completed the design aspects of the PCB and ordered all the components needed for the board. Started building the board towards the end of the week.
This week I completed the design aspects of the PCB and ordered all the components needed for the board. Started building the board towards the end of the week.

WEEK EIGHT :
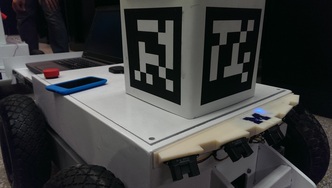
This week we started putting the robot chassis together. The whole team worked together to knock out all the building work and the next week was designated towards wiring and completing the robots.
This week we started putting the robot chassis together. The whole team worked together to knock out all the building work and the next week was designated towards wiring and completing the robots.

WEEK NINE :
We completed the wiring and assembly for the Magic2 Bots in preparation for the Muscatatuck training trip.
We completed the wiring and assembly for the Magic2 Bots in preparation for the Muscatatuck training trip.