Goals
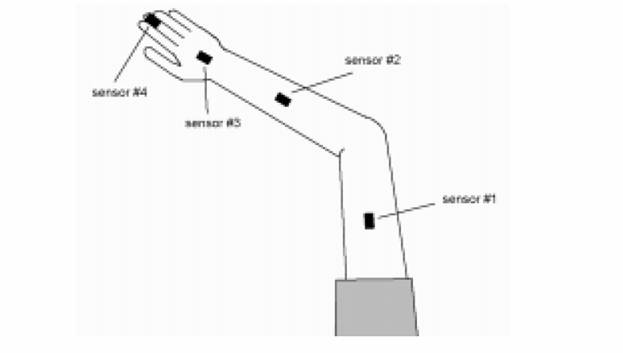
My project aims to develop a good metric for evaluating the learner's performence. Such a metric would compare the movements of the learner with those of the teacher and identify the problem areas independent of speed of movement or physical characteristics of the learner (such as length of limbs). Arm movements will be tracked using a custom-made motion capture system developed in the USC Interaction Lab. The following paper provides a description of the motion caputre system: Nathan Miller, Odest Chadwicke Jenkins, Marcelo Kallmann, Evan Drumwright, and Maja J Mataric´, "Motion Capture from Inertial Sensing for Untethered Humanoid Teleoperation", Proceedings, IEEE-RAS International Conference on Humanoid Robotics (Humanoids-2004) , Santa Monica, CA, Nov 10-12, 2004 [PDF].
My algorithm will try to identify the elementary trajectory segments and evaluate each of them individually. When a "problem" segment is identified, the teacher will go over this segment with the learner until it is correctly executed. Within a particular segment, attention will be payed to individual joints or speed if relevant.