 Project
Project
Project
Project

School: University of Illinois Urbana-Champaign
Lab: Parasol Lab
Department: Department head of Computer Science
Research: Motion Planning Algorithms
Email: namato@illinois.edu
Website: https://parasol.tamu.edu/~amato/
 Link to Energy Biasing Poster
Link to Energy Biasing Poster
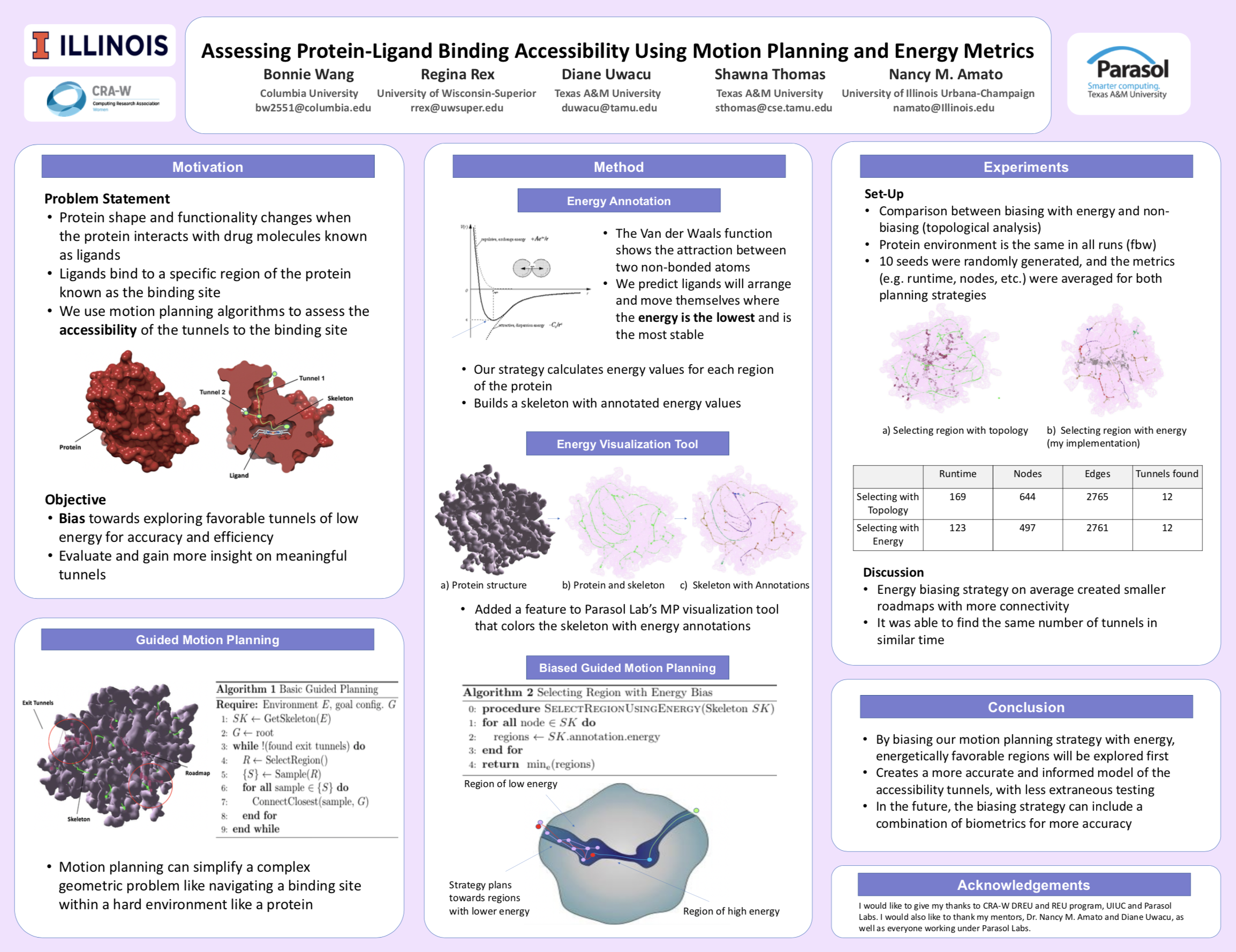
This poster is my contribution in developing a energy biasing planning strategy and testing it on protein environments
Link to Biasing Strategy Technical ReportThis paper was a collaboration, showing the applications and advantages of our biasing planning strategy on both robotics and protein environments. It features energy and clearance biasing strategies.
Background
Motion Planning algorithms is a robotics concept that involves finding a path of valid configurations of a robot to move it from a start to a goal configuration. This concept has heavy applications in a variety of different areas including computational biology. My project involves using motion planning to solve protein-ligand binding problems; previous work used RRG and Mean Curve workspace skeleton to search the protein environment to find valid paths for a ligand to reach binding sites in the complex hull of the protein. My project will be expanding on the skeleton by annotating by energy.
Project Goals
The goal of the project is to accurately and efficiently create roadmaps that would be able to predict paths from the outside of the protein to the binding site in the convex hull. We want to bias the search towards region tunnels that the ligand would most likely take. These tunnels can be biased based on various bio-metrics such as clearance and energy. Previous work has already been done to bias towards clearance which chose to sample towards areas with a larger clearance first. Goals this summer is to reproduce this with an energy function instead, and test this. In addition, we can look for ways to visualize the skeleton clearer. For example, we are looking for ways to create a simple heatmap for both of the metrics, color coding based on high-low regions of clearance and energy.
Experiment Examples
These are eamples of the RRG Strategy building a roadmap on two different seeds. The strategy biases towards low energy region; the color-coded skeleton visualizes this, where the red/yellow areas are low energy while the blue/purple areas are high energy.