Demo-worthy?
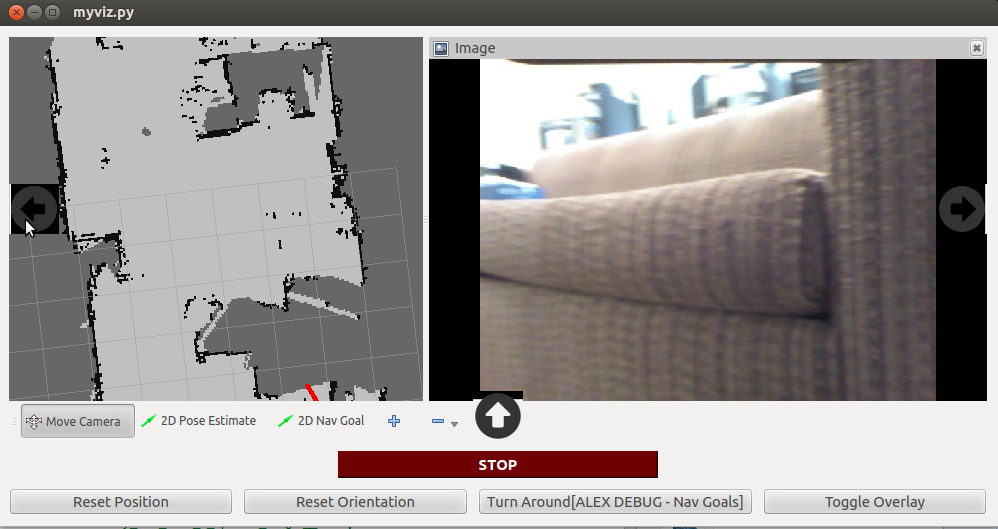
We had a chance to meet and talk with our mentors and I was able to get some good feedback. One quirk that we had was the robot did not rotate 180 degrees when “turn around” was pressed. This was a tolerance issue, so increasing the tolerance made it closer to the ideal rate. I also fixed the bug with the video feed. I went with the first method and added a processEvents() function during the loop, so it would let the video feed and any other functions catch up. The other major bug that was fixed was the issue causing the display not to show up at all! I made the assumption that anything placed in the python script’s directory would be read when the script ran, but it was trying to read from the directory I was currently in (whenever I ran from command line). Adding a parameter to force it to use the directory of the remote_nav package was the fix for this issue, and now it runs consistently.
The paper from the previous user study is completed, and a major task for this week was to have the entire group read through the paper, edit it, and submit their critiques and analyses.